













非接触式粗糙度轮廓仪对粗糙度的精确测量,也是充分利用对被测表面层形貌都没有影向的方式间接性体现被测表面层的信息内容来开展精确测量的方式,这类方法较大 的优点也是精确测量设备探测部分不与被测表面层的直接接触,保障了精确测量设备,与此同时防止了与精确测量设备直接接触引进的测量偏差。
1 光切法
光切法是利用光切工作原理来精确测量粗糙度的方式,它将一缕平形光条以必要角度投射与被测表面层上,光条与表面层轮廓相交的曲线影像即体现了被测表面层的微观几何形状,解决了产品工件表面层细微峰谷深度.的精确测量问题,防止了与被测表面层的接触。因为它选用了光切工作原理,故而能测表面层的轮廓峰谷的较大 和较小相对高度,要受物镜的景深效果和辨别率的受限。峰谷相对高度超过必要的范畴,就不可以在目镜视场中成清楚的逼真图象而造成没法精确测量或是测量偏差挺大但因为该方式低成本、便于实际操作,故而仍在被广泛运用。
2 散斑法
散斑法,有单模光纤半导体材料激光发生器La出现的激光束经透镜散发,由分光镜S分为双路,一路直射被测表面层O,另一路经过S射入平行面反射镜M返回,作为参照光与被测表面层返回的散射光重新在S汇合出现干预,选用工业镜头摄影机纪录干预样图,并储存到电脑中。参照镜M与1个压电陶瓷(PZT)连在一起,PZT由计算机程序控制,能使参照镜M出现1个细微位移W(x,y)将发生变动。因为相位差是与轮廓深度.(即光程差)对应的,故而可经过W(x,y)确定各点的粗糙度。
激光散班图一般体现了被激光直射表面层的微观结构的情况,但要从中直接得出表面层参数的信息内容是越来越困难的,特别在用单色光照明有粗糙表面层时,因为越来越有粗糙表面层所演变成的散斑并不仍然由粗糙度决定了,故而用散斑精确测量粗糙度时,只在必要的范畴内比较好在个别的情况下,因为表面层非常滑腻而没法用电子散斑干涉仪开展精确测量,而很多时候也可能会因为表面层非常有粗糙而没法精确测量,故这时候需用银灰色的喷漆作为辅助方式,其形状差条纹的灵敏度可高达10μm。
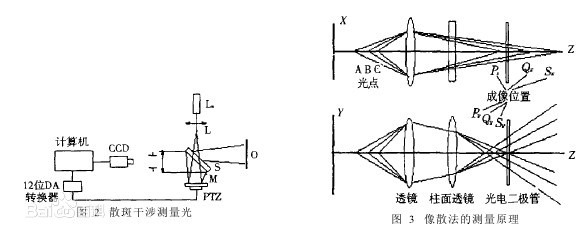
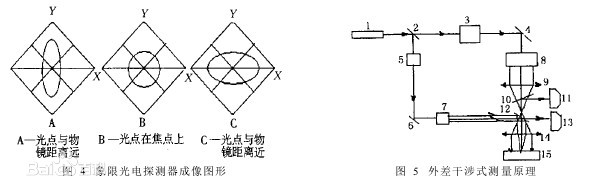
3 像散测定法
像散测定法图3为其在测量的原理产品的表面上被照射着的光B凭借物镜显像于位置上Qx当强光与物镜间距(直线光轴方位)变成A或是C时,则显像位置上也会各自移到Px或Sx若从处于中间并垂直于光轴的面上来观察其激光束,就可发现激光束的直徑也随着转变也就是能够检验激光束直徑的变化量来判定显像的位置上在物镜插入一块儿只可以在Y轴方位聚束的柱面透镜Y轴这方面的显像将往前移到Py,Qy,Sy之后激光束便散发因为X轴,Y轴方位上显像位置上的不一样,激光束成扁圆形,如图4所显示,故强光避开物镜时,则为长轴在Y轴上的椭圆;反过来,靠近物镜时,则为长轴在X轴上的椭圆,用象限光电探测器(四等分光敏二极管)作感应器,激光束经光电转换后再扩大和测算,可得到 与被测的表面细微变位量相对应的輸出数据信号,这个方式分辨率可做到纳米级别,但测量范围较小。
4 光外差干扰法
光外差干扰法普遍的干扰光学显微镜分二种方式,光外差干扰法就是在此基础上提出的一种新方式。图5是光外差法的原理图。由He-Ne激光发生器1传出的激光束被分光镜2分成双路:一路电子衍射经声光电调制器凡特一级电子衍射光频率增大f2=40MHZ、经平面反射镜4扩束系统8由透镜会聚到物镜14的后焦点上,经14后成为平行光照射到被测面15上,作为参照激光束;另一路由分光镜2光反射经声光电调制器5一级电子衍射光频增大f1=41MHZ、经平面反射镜6扩束系统7分光镜12,由物镜14会聚在样品的表面,作为在测量激光束,在测量光斑的尺寸大小由物镜14的叁数决定了。
透过分光镜12的在测量激光束与被分光镜12光反射的参照激光束形成拍波;由探测仪13接受,形成参照数据信号,而从被测面回到的两束光由分光镜10光反射进到探测仪12形成在测量数据信号将探测仪11、13接受到的在测量与参照数据信号送入相位计进行比相,于是可测得的表面轮廓高度值从理论推导中能够看到,干涉仪二臂不共路部分的相位差凭借比相,其干扰被祛除,这对提升仪器设备的抗干扰性,提升信噪比非常有私该在测量设备的短处是用了2个价格比较贵的声光电调制器,不益于产品化。
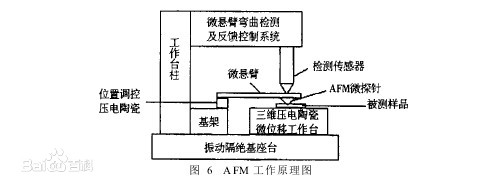
5 AFM法
AFM的基本原理如下图6所显示当将1个对很弱力极为灵敏的微横臂一边固定不动,另一头带着一细微探头(约10nm)靠近被检测样至纳米级间距区域时,依据量子力学理论研究,在这个细微缝隙内因为针头尖部原子与样机表面层原子间产生极很弱的原子排斥力。由驱动器操控系统把控X,Y,Z三維压电式陶瓷微位移操作台推动其上的被测样机靠近探头并使探头相对扫描被测样机。借助在扫描时把控该原子力的定态,带着针头的微横臂在扫描被测样机时因为受针头与样机表面层原子间的作用力的作用而在垂直样机表面层的方位波动运魂利用微横臂弯折监测系统能测得微横臂对应于各扫描点部位的弯折改变,进而能够得到 样机表面层形貌的三維信息内容,其髙度方位和水平方向的分辨率可各自做到0.1nm和1nm。
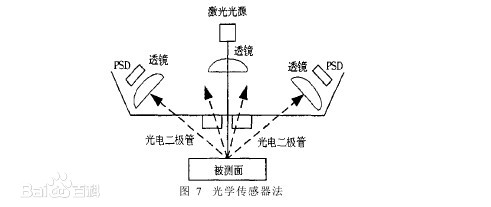
6 光学传感器法
光学传感器法是在电子光学三角测距法的基本原理上提到来的,其基本原理如下图7所显示设备主要是有两部份构成,有两个部位灵敏探测器(PSD)和激光发生器构成的对称性三角测距器及2个光电二极管构成的光线传感器由PSD检测到随带被测物件表面层信息内容的光信号,輸出双路讯号(Td和Tcl);光电二极管检测到的光信号后輸出一路模拟电压讯号(Sc2),随后运用PSD和光电二极管检测到的讯号与被测物表面粗糙度的相互关系就可以确认被测物件表面层的表面粗糙度该办法选用技術较成熟的电子光学三角法,比较容易实现,但是测量精度不高。
更多粗表面粗糙度轮廓度测量仪产品功能和报价问题,您可在线咨询或给我们来电:027-84391837 ,武汉斯玛特仪器有限公司将最快时间回复您。